用于电机驱动的MOSFET驱动器
 -
-
简介
在电机驱动系统中,栅极驱动器或“预驱动器” IC常与N沟道功率MOSFET一起使用,以提供驱动电机所需的大电流。在选择驱动器IC、MOSFET以及某些情况下用到的相关无源元件时,有很多需要考量的设计因素。如果对这个过程了解不透彻,将导致实现方式的差强人意。
本文将介绍一些简单的方法来为预驱动器/功率MOSFET电路选择组件,并讨论由此得到的系统性能。
从电机开始
为直流电机(无论是有刷电机,还是三相无刷电机)设计驱动器,应从电机入手。电机的特性将决定驱动器的设计细节,而其中两个主要因素就是电机的工作电压和电流要求。
这两个参数看似简单,实则不然。一般情况下,电机具有给定的额定电压和额定电流,但在实际工作中,其值可能与额定值不同。电机实际速度取决于所施加的电压,电机所需的电流取决于所施加的扭矩。因此,驱动器设计不一定需要完全满足电机规格。
电机数据手册中通常会给出速度常数和扭矩常数,这两个参数可用于估算特定应用所需的电压和电流。驱动器的供电电压必须至少与电机获得所需速度需要的电压一样高,但是电源电压通常取决于系统的可用电压。而最大电流需求则通常由电机启动机械负载所需的扭矩来决定。
选择MOSFET
确保所选功率MOSFET的额定值至少等于电机所需的电源电压和最大电流。当然,最好还留有一定裕量。
通常情况下,MOSFET的漏源电压额定值(VDS)应至少比电源电压高20%。在某些情况下,尤其是在电流大、扭矩步长大、电源控制不良的系统中,所需裕量可能需要高达电源电压的两倍。
因此,MOSFET的额定电流必须足够高,才能提供电机所需的峰值电流。但散热又是个不得不考量的大问题。MOSFET耗散功率并在漏源电阻RDS(ON)中产生热量。包括环境温度和MOSFET散热在内的热条件决定了可以耗散的功率。而最大允许功耗最终决定了如何选择基于。RDS(ON)值的MOSFET.
8一旦确定了必要的额定电压和RDS(ON),剩下最重要就是考虑总栅极电荷(QG)了。栅极电荷用于度量导通和关断MOSFET所需的电荷量。(QG)较低的MOSFET更易于驱动。与具有较高(QG)的MOSFET相比,它可以以较低的栅极驱动电流进行更快的切换。
栅极驱动电流和上升/下降时间
功率MOSFET的栅极可以看作是栅极和源极端子之间的非线性电容。 尽管栅极不传导直流电流,也需要电流来对栅极电容充电和放电,以导通和关断MOSFET。提供给栅极的电流量决定了完全导通MOSFET所需的时间。相反,栅极的拉电流量则决定了MOSFET关断需要的时间。
要了解驱动栅极所需的条件,首先要知道MOSFET的切换速度。低开关损耗需要快速的上升和下降时间,而低EMI需要缓慢的上升和下降时间,设计师必须在二者之间做出权衡。此外,PWM频率以及所需的最小和最大占空比也给切换速度增加了一层限制。例如,在20kHz PWM频率下,1%占空比需要产生500ns长的脉冲,这需要几百纳秒或更短的上升和下降时间。
当所需的上升/下降时间确定之后,再来计算必要的栅极驱动电流。我们可以用(QG) / t来估算栅极驱动电流,其中(QG) 是总栅极电荷,t是所需的上升/下降时间。
注意,这个电流是在整个上升/下降时间内所需的驱动电流量。实际中的栅极驱动电流在这段时间内通常会有所变化,因为大多数栅极驱动器都不是恒流驱动器。
如果为栅极提供恒定电流,则栅极上的电压不是线性斜率变化-它在MOSFET切换期间会有一段平稳状态(见图1)。这被称为“米勒高原”,它是由栅漏电容引起的。在漏极转换期间,栅漏电容需要电流充电,造成栅源电容的充电速度变慢。
提供给栅极的充电电流越低,转换完成所需的时间就越长。
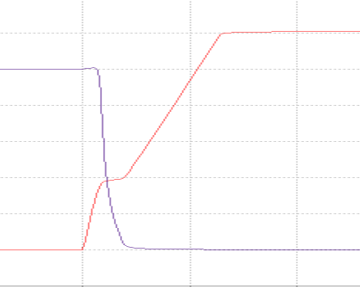
图1: 1A恒定电流栅极驱动(100nC – 红色 = 栅极, 紫色= 漏极, 200ns/div)
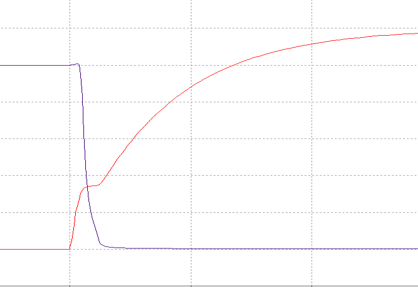
图2: 具备12Ω串联电阻的 12V栅极驱动(100nC – 红色 = 栅极, 紫色= 漏极, 200ns/div)
图2为具有12Ω串联电阻的12V恒压栅极驱动器波形。在这种情况下“米勒高原”仍然存在,栅极达到12V所需的时间更长,但漏极的切换时间几乎没变。
选择预驱动器IC
所需的最小栅极驱动电流一旦确定,就可以选择支持该电流的栅极驱动器(预驱动器)IC了。这类器件种类繁多,可能具有不同的通道数、栅极驱动电流能力和电源电压范围。有些器件还提供了其他集成功能,例如集成电流采样放大器和保护电路等。
许多半导体供应商都提供用于电源管理产品(包括MPS的电源管理产品)的预驱动器IC,其中有许多用于直流电机驱动器的单通道和三通道预驱动器IC,包括三通道60V和100V系列以及单相100V器件。
部分预驱动器IC使用线性稳压器、电荷泵和/或自举电容器从主电机电源内部生成所需的栅极驱动电压。而另一些则需要单独的栅极驱动电源。如果要实现100%占空比工作(长时间输出高电平),则选择带有内部电荷泵的预驱动器,这样才能使上管栅极长时间保持导通。如果仅依靠自举电路驱动上管,则预驱动器只能在有限的时间内保持上管MOSFET导通,因为漏电流会在一段时间后耗尽自举电容。
栅极驱动器最低限度需要提供实现上述上升和下降时间所需的电流量,但也可以使用具有更大电流能力的驱动器。
部分驱动器IC通过改变器件内部的栅极驱动量来调节上升和下降时间(也称为“斜率调节”)。当所采用的器件不具备内置斜率调节功能时,也可以在栅极驱动器输出和MOSFET栅极之间插入电阻来调节。但这种方法会限制栅极电流,并减慢上升和下降时间。
添加一个二极管,可以获得独立的上升和下降时间(见图3)。
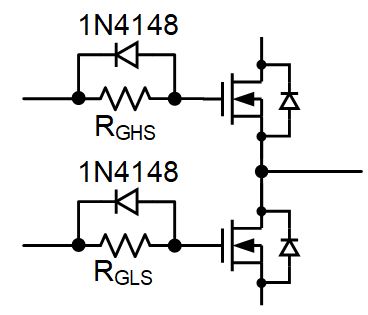
图3: 添加二极管示意图
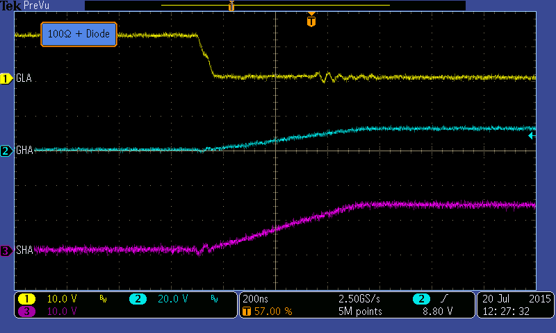
图4: 栅极和输出波形
采用这种方法通常是为了确保半桥结构中的一个FET在对面FET导通之前完全关断,从而确保死区时间。图4显示出,下管栅极(GLA)通过二极管放电时下降非常快,但上管栅极(GHA)由于电阻的存在充电缓慢。其结果是,由上管MOSFET导通控制的输出(SHA)缓慢上升。
由于栅极具有非线性电容,而且驱动器通常不是真正的电压或电流源(通常是在线性区域中工作的FET),因此很难准确计算出实现特定上升或下降时间所需的电阻 。一般情况下,最好通过实验或仿真得出正确的值。可以从假设栅极驱动电流等于栅极驱动电压(通常为12V)除以串联电阻开始。计算时,确保包含了栅极驱动器的输出电阻。
结论
本文提供的实用信息可为带预驱动器IC和功率MOSFET的电机驱动器提供更佳组件选择,希望可以帮助设计师在电机驱动器设计中选择到正确的IC和相关组件。
_________________________
技术论坛
 Latest activity 11 months ago
Latest activity 11 months ago
 3 回复
Latest activity 4 years ago
2 回复
Latest activity a year ago
44 回复
3 回复
Latest activity 4 years ago
2 回复
Latest activity a year ago
44 回复
直接登录
创建新帐号